DexHand vs LEAP Hand
DexHand vs. LEAP Hand
After evaluating various robotic hands, we’ve narrowed our choice to two contenders: DexHand and LEAP Hand Hand. Here, we provide a detailed description and comparison of both hands to aid in our final decision.
DexHand
Overview:
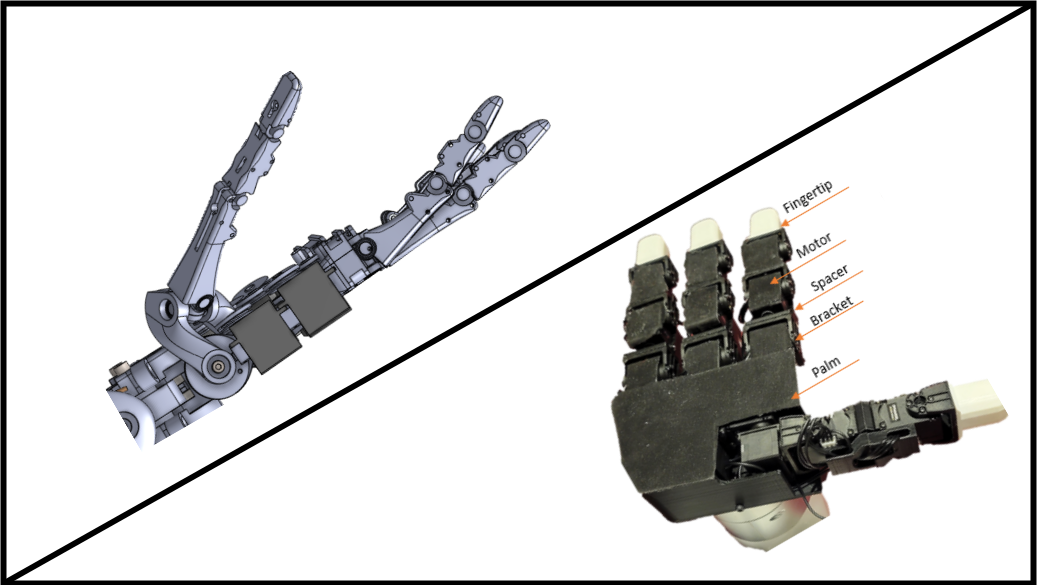
DexHand is a low-cost, open-source dexterous hand designed for research and development on humanoid robots. It is maintained by The Robot Studio and IoT Design Shop. A newer version, DexHand V2, is in the early stages of development and is expected to be available for purchase for research purposes. However, this newer hand appears to be closed-source.
Technical Specifications:
- Servomotors: 18 total
- 12 for the fingers
- 4 for the thumb
- 2 for wrist rotation
- Servomotor Brand: MKS Slim Servos
- Documentation: Comprehensive documentation is available on their website, including assembly videos and CAD visualization.
Issues:
- Bill of Materials (BOM) is scattered across GitHub repositories and YouTube comments, necessitating consolidation.
- Limited compatibility with collaborative robots like the UR10.
Kinematics
Understanding the movement of the hand, which involves both passive and active joints, is challenging due to the nature of the actuation and the limited kinematic documentation available. By analyzing assembly and demonstration videos along with the CAD assembly, we have gained a clearer understanding of the hand’s movement.
In our analysis, we use color coding to distinguish different types of joint movements:
- Cyan indicates the active joints in the system.
- Purple signifies the movements produced by spring-like systems.
- Orange represents movements generated by mechanical constraints rather than actuated motors, i.e., passive joints.
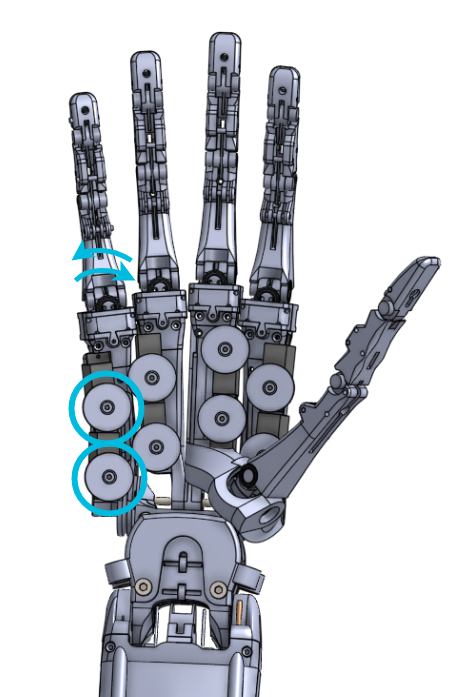 Fig 1: The 2 servomotors highlighted rotate each finger for the adduction/abduction movement
Fig 1: The 2 servomotors highlighted rotate each finger for the adduction/abduction movement 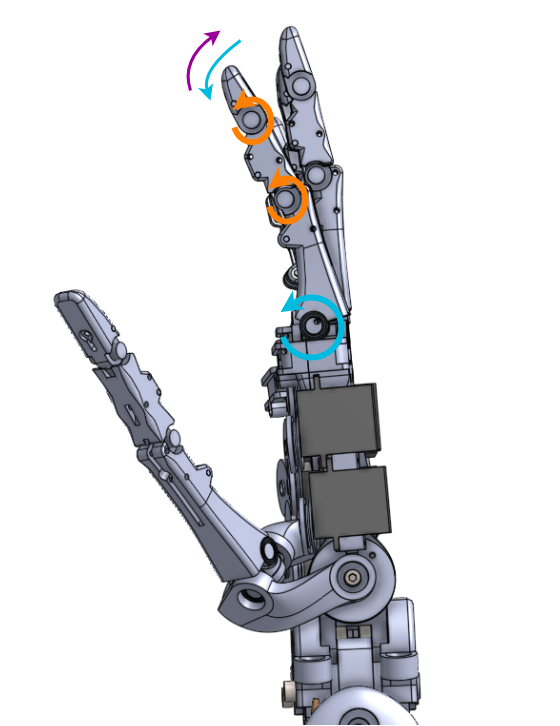 Fig 2: The 2 palm servomotors rotate the knuckle joint. A servomotor in the wrist pulls the finger’s tip, causing a flexion movement at the passive joints. The extension movement is produced by a spring mechanism.
Fig 2: The 2 palm servomotors rotate the knuckle joint. A servomotor in the wrist pulls the finger’s tip, causing a flexion movement at the passive joints. The extension movement is produced by a spring mechanism. 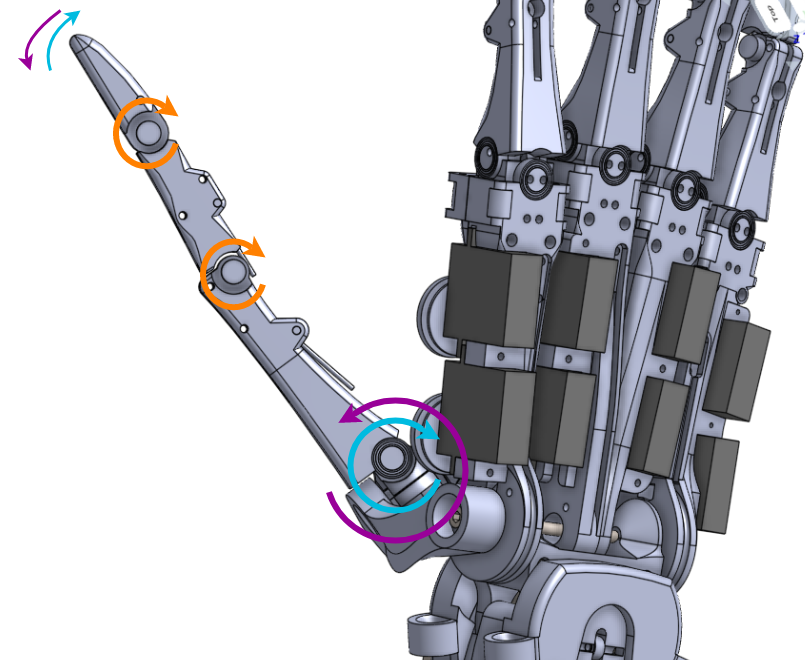 Fig 3: At the base of the thumb, the flexion joint is directly actuated. The extension of this joint is achieved through a spring mechanism. Additionally, a servomotor in the wrist pulls the finger’s tip, causing flexion at the passive joints, while the extension movement is also facilitated by a spring mechanism
Fig 3: At the base of the thumb, the flexion joint is directly actuated. The extension of this joint is achieved through a spring mechanism. Additionally, a servomotor in the wrist pulls the finger’s tip, causing flexion at the passive joints, while the extension movement is also facilitated by a spring mechanism 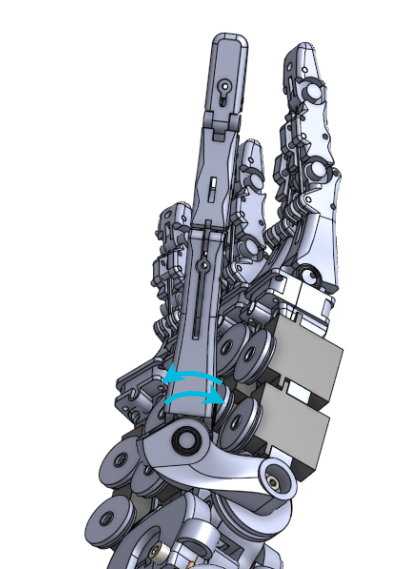 Fig 4: The thumb has adduction/abduction movement.
Fig 4: The thumb has adduction/abduction movement. 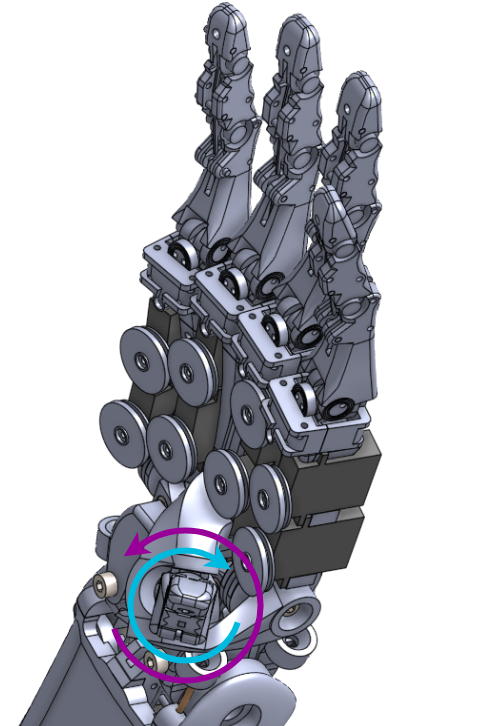 Fig 5: The thumb has an actuator that allows slight rotation along its axis, with the resting position maintained by a spring system.
Fig 5: The thumb has an actuator that allows slight rotation along its axis, with the resting position maintained by a spring system. 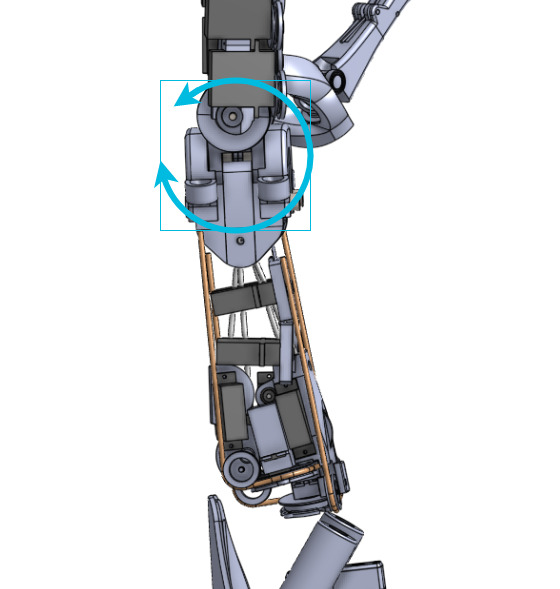 Fig 6: Servomotors in the wrist enable wrist pitch rotation
Fig 6: Servomotors in the wrist enable wrist pitch rotation 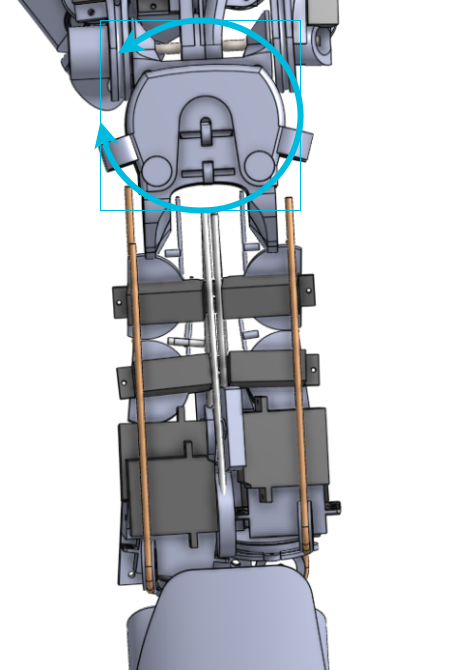 Fig 7: Servomotors in the wrist enable yaw rotation
Fig 7: Servomotors in the wrist enable yaw rotation
In Figure 1, the 2 servomotors highlighted rotate each finger for the adduction/abduction movement. In Figure 2, same servomotors rotate the knuckle joint. A servomotor in the wrist pulls the finger’s tip, causing a flexion movement at the passive joints. The extension movement is produced by a spring mechanism.
In Figure 3 is shown that at the base of the thumb, the flexion joint is directly actuated. The extension of this joint is achieved through a spring mechanism. Additionally, a servomotor in the wrist pulls the finger’s tip, causing flexion at the passive joints, while the extension movement is also facilitated by a spring mechanism. The thumb also has adduction/abduction movement, shown in Figure 4. Lastly, in Figure 5, the thumb has an actuator that allows slight rotation along its axis, with the resting position maintained by a spring system.
In Figures 6 and 7, servomotors in the wrist enable pitch and yaw rotations.
LEAP Hand
Overview:
LEAP Hand is an anthropomorphic hand developed by researchers at Carnegie Mellon University (CMU). Unlike traditional designs that mimic human hand kinematics, LEAP Hand is designed to maximize movement freedom. Detailed information is available on their website. This hand design was proposed in a paper presented at the Robotics: Science and Systems Conference.
Technical Specifications:
- Servomotors: 16
- Servomotors Brand: Dynamixel XC330-M288-T
- Documentation: Extensive and centralized, reflecting its academic origins. Implementations of hardware-free teleoperation and Behavior Cloning (Imitation Learning) are well-documented.
Kinematics
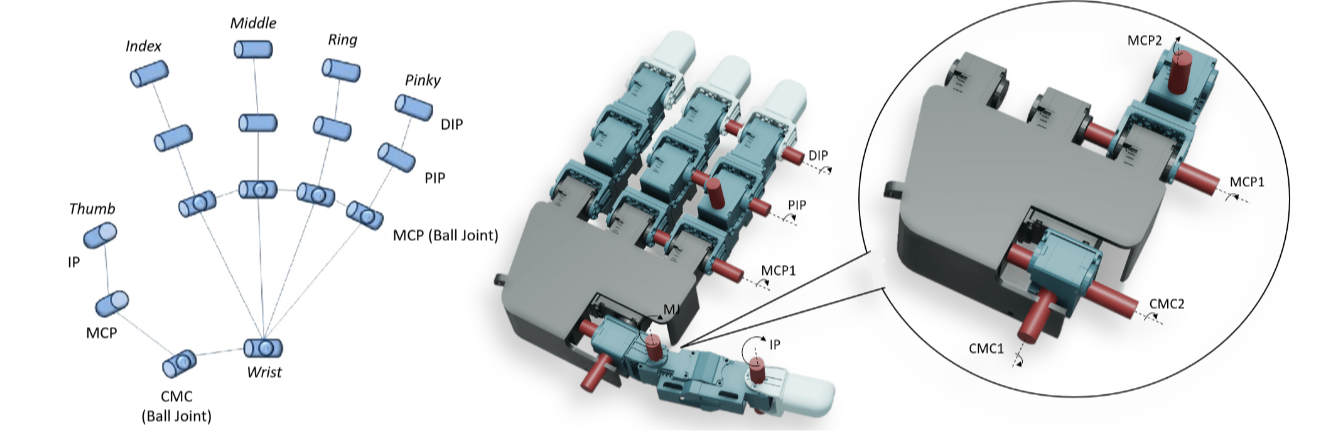 Fig 8: LEAP Hand’s kinematic diagram
Fig 8: LEAP Hand’s kinematic diagram
Figure 8 displays the kinematic diagram of the LEAP Hand as presented in the original paper. Each finger and thumb is equipped with 4 actuated joints, including 2 knuckle joints, facilitating adduction/abduction and flexion/extension movements. This configuration accounts for the 16 joints of the hand. Additionally, the paper mentions 2 degrees of freedom (DoF) for the wrist.
Comparison
| Properties | Weight | LEAP (1-5) | DexHand (1-5) |
|---|---|---|---|
| Documentation | 0.15 | 5 | 3 |
| Assembly | 0.15 | 5 | 4 |
| Anthropomorphism | 0.20 | 3 | 5 |
| Community | 0.10 | 4 | 3 |
| Robot Arm Compatibility | 0.20 | 4 | 3 |
| Software | 0.20 | 5 | 4 |
| Total | 1 | 4.30 | 3.75 |
The weights assigned reflect my subjective opinion and are open to debate and interpretation.
Documentation: LEAP appears to have superior documentation compared to DexHand. While both provide relevant information, LEAP consolidates all the necessary details on a single website, making it easily accessible. In contrast, DexHand’s documentation is scattered across GitHub repositories and YouTube comment sections, leading to disorganization. Although the information is available, its fragmented nature can make it challenging to navigate. Furthermore, the fact that the producers of DexHand are focusing on a closed-source DexHand V2 suggests that the documentation may remain disorganized for the foreseeable future.
Assemlby: DexHand appears to present a more challenging assembly process compared to LEAP, primarily due to its tendon actuation mechanism. While both hands have assembly videos available, DexHand’s tendon actuation system likely adds complexity to the assembly process.
Anthropomorphism: DexHand excels in anthropomorphism, closely resembling the human hand in its design and functionality. The videos clearly demonstrate its inspiration from human anatomy, mimicking tendons and actuations to achieve naturalistic movements. The previous figures showcasing the actuations further highlight the striking similarity to the human hand. This anthropomorphic design adds a level of familiarity and intuitiveness to DexHand, potentially making it more user-friendly and versatile in human-machine interactions.
Community: Both projects, DexHand and LEAP, have garnered some community engagement, although it seems to be relatively limited at this stage. However, there are some notable differences in their approach to community support and future development. With DexHand, the developers are currently focused on a closed-source DexHand V2 project, which raises concerns about the long-term support and availability of resources for DexHand V1. The lack of clarity regarding whether DexHand V2 will be open-source in the future adds uncertainty to the community’s ability to receive support from the creators. On the other hand, LEAP demonstrates a commitment to engaging with the community by responding to issues posted on GitHub. While the level of engagement may still be modest, this willingness to address user concerns and provide support suggests a more transparent and potentially sustainable approach to community involvement.
Robotic Arm Compatibility: DexHand may require custom development for compatibility with robotic arms, as it was designed for a specific anthropomorphic arm. In contrast, LEAP is demonstrated to be compatible with the Franka Panda robotic arm, suggesting easier integration with other robotic arms like the UR10.
Software: LEAP Hand appears to have a slight edge. Both hands offer well-documented low-level motor control, such as Arduino code, but LEAP Hand’s implementation in ROS 1 Noetic aligns well with our existing systems, whereas DexHand utilizes ROS 2, which is the current community supported version. Moreover, LEAP Hand provides its own simulation environment in Isaac Gym, a Nvidia Simulator, enhancing its usability for experimentation and development. Additionally, LEAP Hand has more experimentation and code related to learning frameworks and human interaction, which could offer valuable insights and opportunities for research.
Conclusion
Both DexHand and LEAP Hand are excellent choices for research purposes, each with distinct advantages. DexHand offers superior anthropomorphism, which could be crucial for certain applications. On the other hand, LEAP Hand provides better documentation, ease of assembly, and software support, making it slightly more attractive overall.
Ultimately, the choice depends on the specific needs of our future projects. Both hands meet our minimum requirements, and either would be a valuable addition to our research toolkit. The decision should weigh the importance of anthropomorphic fidelity against the benefits of ease of use and integration.