
Correcting FSR400 implementation
In this post we will analyze the electrical instrumentation regarding the implementation of the FSR400 force sensors. The design choices in the instrumentation affect the resolution of the measured...
In this post we will analyze the electrical instrumentation regarding the implementation of the FSR400 force sensors. The design choices in the instrumentation affect the resolution of the measured...
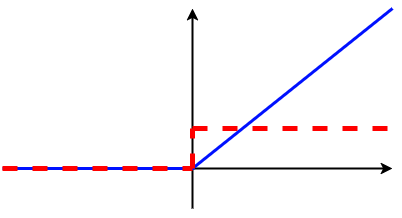
In this post, we’ll ponder on one of the most prevalent problems in Deep Learning (DL), shaping the field by making it taking it into account when proposing new architectures or learning methods. G...
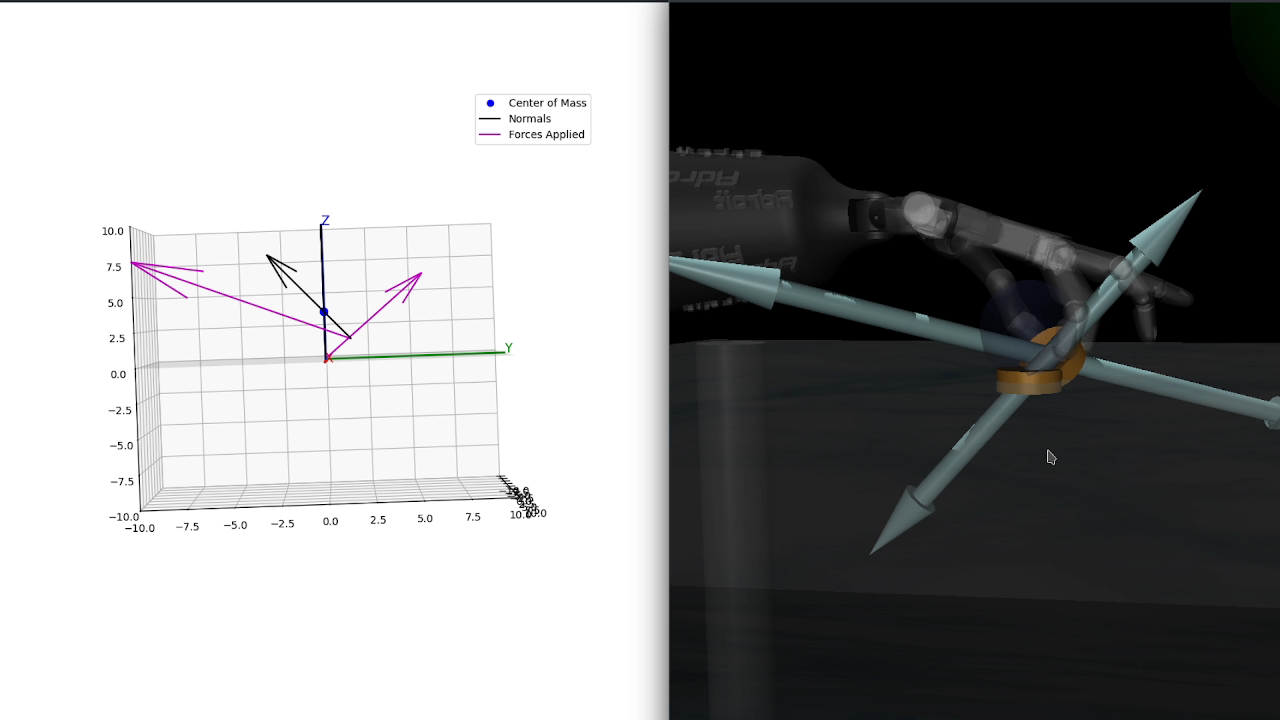
This blog post serves as documentation of the process of implementing grasp evaluation metrics in the MuJoCo simulation. To provide a complete record, we will first describe our initial approach, w...

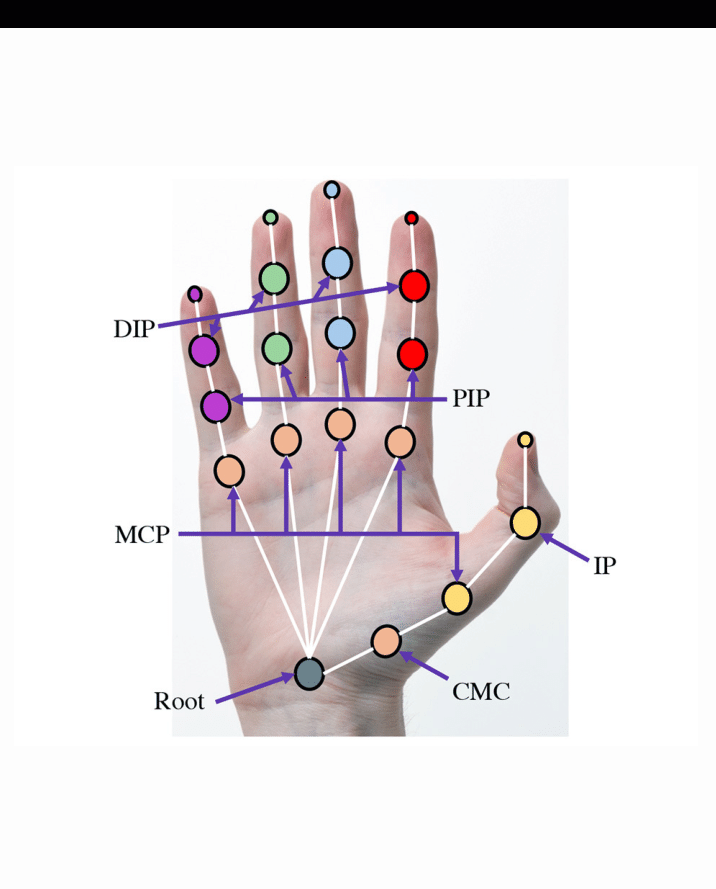
Introduction In this blog post, we will explore the fundamental concepts of robotic grasping. First, we will summarize the theory and mathematical models underlying robotic grasping, focusing on t...
Introduction This will be a short post that I was initially hesitant to write, but the insights and results from this experiment are valuable enough to document. In essence, I spent about a day t...
Introduction This blog post will focus on t-SNE (t-distributed Stochastic Neighbor Embedding) as a tool for data visualization in reinforcement learning problems. We will begin by providing a quic...
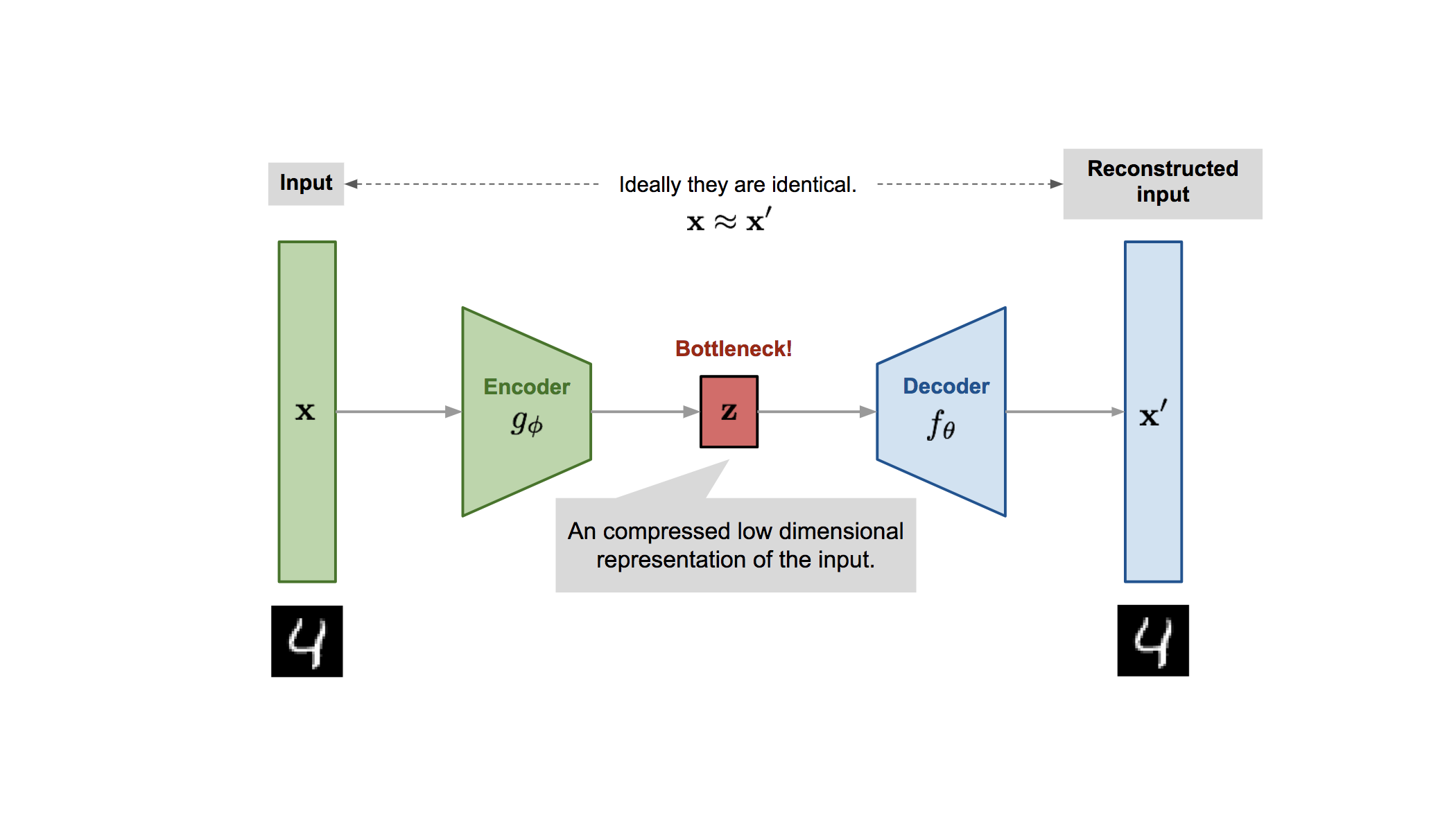
Introduction Typically, an autoencoder is a type of neural network used to reduce the dimensionality of data by projecting it onto a lower-dimensional manifold. This is achieved through a network ...

Introduction When working with reinforcement learning algorithms, stability and consistency are crucial for achieving optimal performance. One powerful method, Soft Actor-Critic (SAC), combines th...
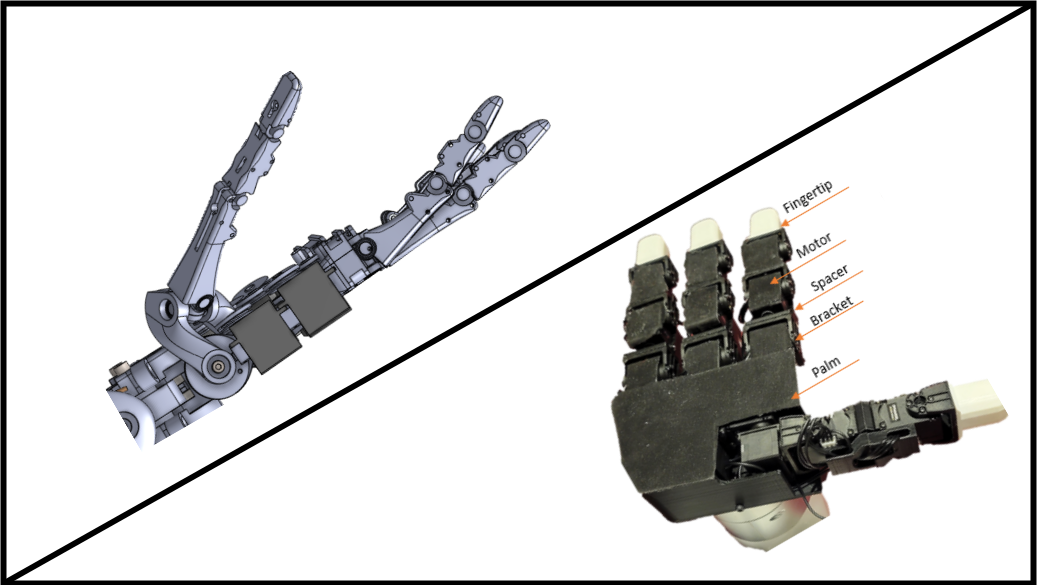
DexHand vs. LEAP Hand After evaluating various robotic hands, we’ve narrowed our choice to two contenders: DexHand and LEAP Hand Hand. Here, we provide a detailed description and comparison of bot...
Properties of Robotic Hand Projects This post aims to document and assess open-source anthropomorphic hands, with the goal of identifying the most suitable candidate for construction in our labora...