Anthropomorphic Hand
Properties of Robotic Hand Projects
This post aims to document and assess open-source anthropomorphic hands, with the goal of identifying the most suitable candidate for construction in our laboratory. Upon analyzing various hands, several key aspects have emerged as crucial considerations:
- Source: The entity or entities responsible for the hand’s project.
- Design: Essential design elements such as finger movement types and Degrees of Freedom (DoF). DoF refers to the actuated joints, excluding passive joints.
- Actuation Type: The method of actuation for finger movement, primarily between servomotors and tendons (cables).
- Sensors: Built-in sensor devices as per the project plans.
- Software: Availability of software for hand control and communication.
- Community: Informal evaluation of metrics indicating community and author engagement with the project.
- Cost: Manufacturing cost of the hand, including 3D printing and hardware.
- Year: The publication or acceptance date of the hand’s paper, or the oldest reference available for hands developed by companies.
- License: Usage license stipulated for the hand, typically sourced from scientific articles or GitHub repositories.
Candidates’ List
- [1] - An open-source anthropomorphic robot hand system: HRI hand
- [2] - Low-cost and open-source anthropomorphic prosthetics hand using linear actuators
- [3] - https://github.com/hansonrobotics/Anthropomorphic-Robot-Hand
- [4] - An Open-Source Mechanical Design of ALARIS Hand: A 6-DOF Anthropomorphic Robotic Hand
- [5] - LEAP Hand: Low-Cost, Efficient, and Anthropomorphic Hand for Robot Learning
- [6] - A Low-cost Open Source 3D-Printable Dexterous Anthropomorphic Robotic Hand with a Parallel Spherical Joint Wrist for Sign Languages Reproduction
- [7] - Robot Nano Hand
- [8] - DexHand - An Open Source Dexterous Humanoid Robot Hand
The following table gives a summarized list of the important properties of each hand.
| # | Source | DoF | Actuation | Sensors | Software | Arm Compatibility | Community | Cost($) | Year | License | # |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Kyung Hee University Korea | 6 | Linear motors | None | ROS/Bluetooth | UR3 | Active | 1400 | 2019 | MIT | 1 |
| 2 | Open Bionincs | 5 | Tendons | IMU | ROS | Maybe | Inactive | 470 | 2020 | CC BY-SA 4.0 | 2 |
| 3 | Sofia Robot Project (w/ IIT) | 9 | Tendons | None | None | No | Inactive | N/A | 2017 | CC BY-SA 4.0 | 3 |
| 4 | Nazarbayev University Kazakhstan | 6 | Tendons | Position | None | Not Mentioned | Inactive | 500 | 2021 | GPL-3.0 | 4 |
| 5 | CMU | 16 | Servomotors | Position | ROS/USB/ Simmulation | Franka Panda | Active | 2000 | 2023 | CC BY-SA 4.0 | 5 |
| 6 | Politecnico di Torino Italy | 8 | Tendons | Position | ROS | Not Mentioned | Inactive | 2000 | 2016 | GPL-2.0 | 6 |
| 7 | Silicon Highway The Robot Studio CodeThink | 11 | Tendons | Camera | Exists/USB | Not Mentined | Active | <1000 | 2021 | CC BY-SA 3.0 | 7 |
| 8 | The Robot Studio IoT Shop | 16 | Tendons | None | ROS | Not Mentioned | Active | <1000 | 2022 | CC BY-SA 4.0 | 8 |
Top Candidates
After thorough evaluation, four candidates have stood out:
- [1] - HRI Hand
- [5] - LEAP Hand
- [7] - Robot Nano Hand
- [8] - DexHand
All these options are relatively recent, boasting an active community, implemented software (mostly on ROS), provided Bill of Materials and CADs, and comprehensive documentation. These attributes are mandatory for our consideration.
What distinguishes these options are the actuation type, DoF, and compatibility with robotic arms.
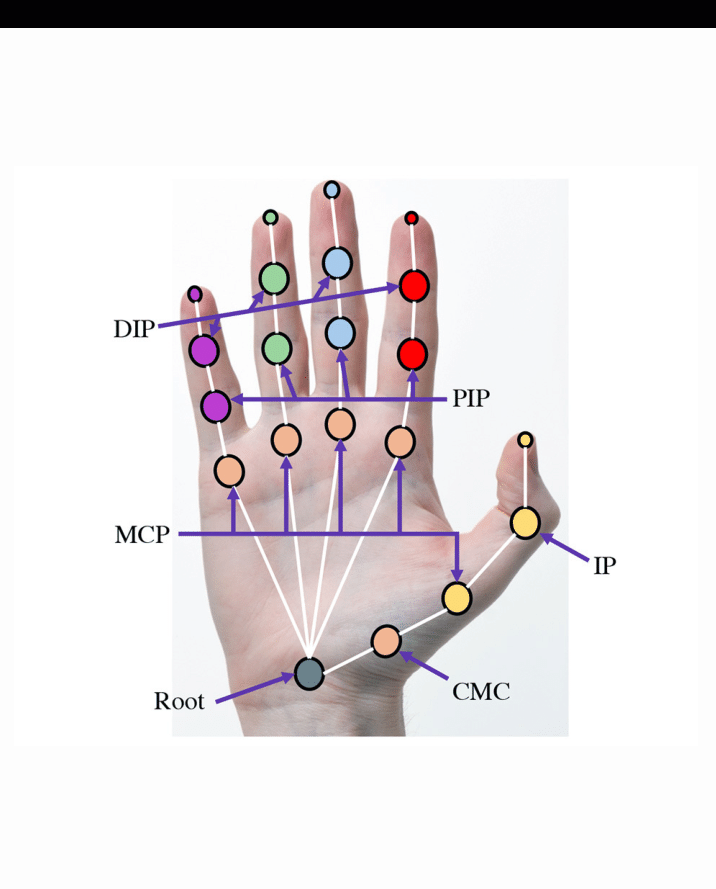
To evaluate the design effectively, it’s crucial to consider the classification of human finger movements (Figure 1). A good hand should be capable of performing all types of flexion/extension and adduction/abduction.
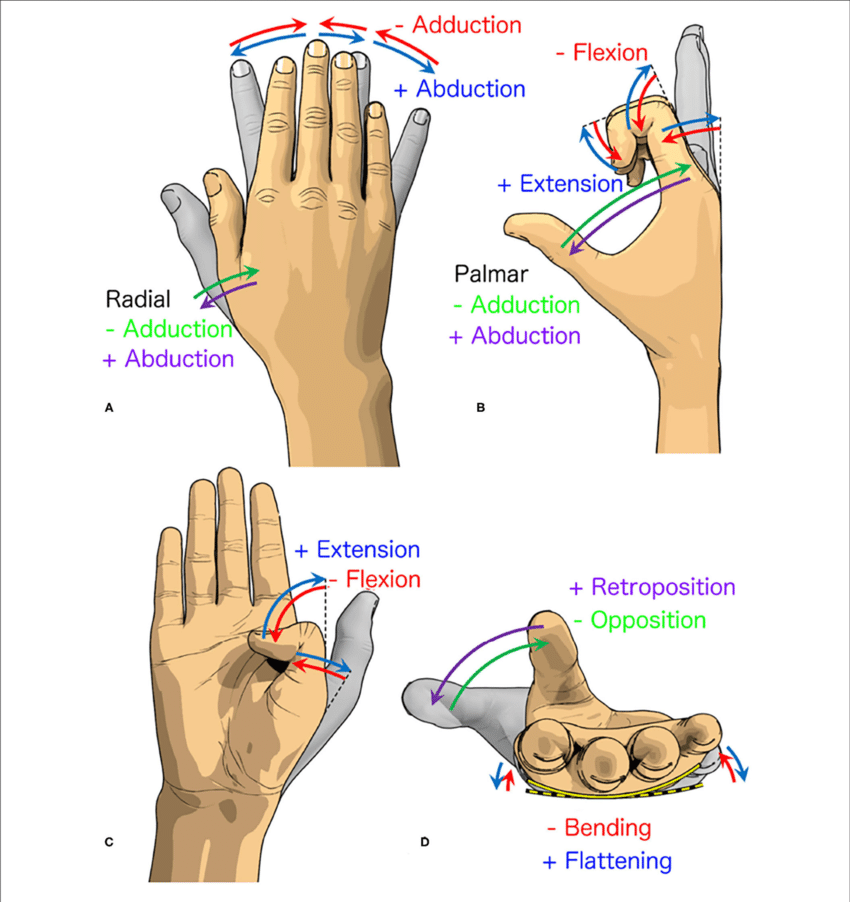 Fig 1: Different types of hand/finger movements
Fig 1: Different types of hand/finger movements
HRI Hand
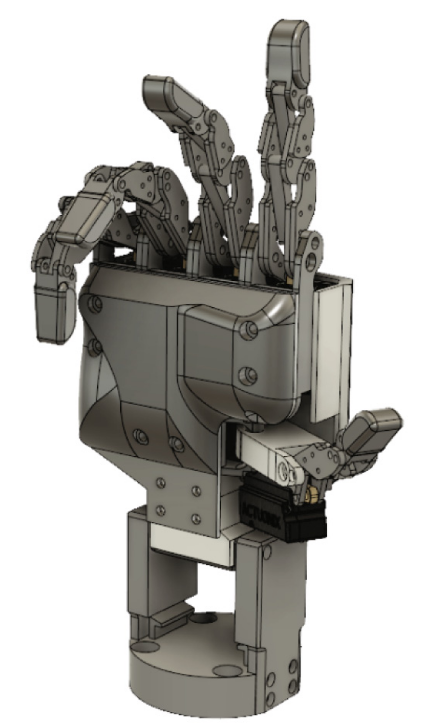 Fig 2: HRI Hand
Fig 2: HRI Hand
The HRI Hand provides 15 DoF, with some being passive and only 6 being actively actuated joints. Each finger has one actuated joint, while the other two move dependently. It features a semi-opposable thumb, primarily opposable to the index finger.
The design employs a two four-bar linkage mechanism (figure 3), with the first rotation point actuated by a linear motor. Despite being under-actuated, it’s easy to build and compatible with Universal Robots.
Click here to see HRI Hand in movement.
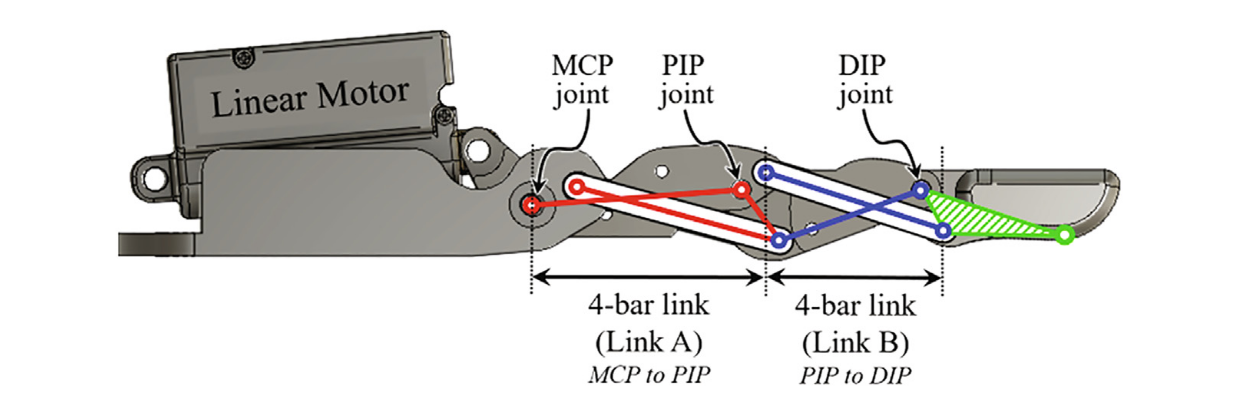 Fig 3: HRI Hand’s actuation mechanism
Fig 3: HRI Hand’s actuation mechanism
LEAP Hand
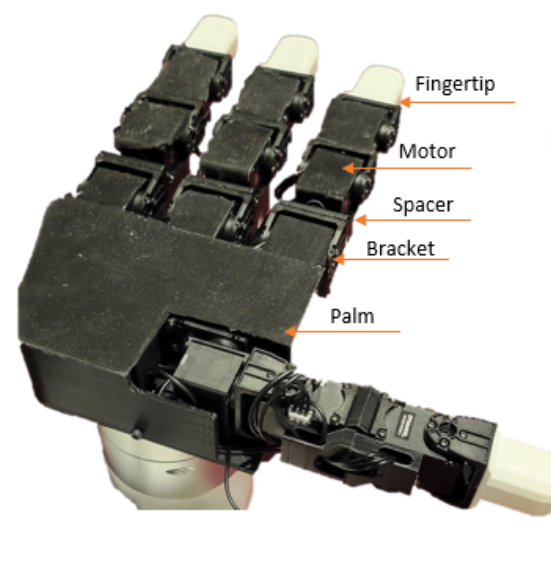 Fig 4: LEAP Hand
Fig 4: LEAP Hand
LEAP Hand, developed by CMU, is comparable to the Allegro Hand, although the latter is closed source. Designed for behavioral cloning, it offers 16 actuated joints, allowing for movements beyond human capability.
Despite having only 4 fingers, each actuated joint features a servomotor, resulting in a bulky appearance. However, this design simplifies construction and enhances versatility for studying different robotic control strategies.
Furthermore, the LEAP Hand includes position sensors and simulation capabilities. Additionally, the authors claim that it is easily mountable on any robotic arm, bug was only demonstrated with the Franka Emika Panda.
The authors also hinted at future plans to integrate touch sensors into the hand, promising further enhancements.
Click here to see LEAP Hand movement.
Nano Robot Hand & DexHand
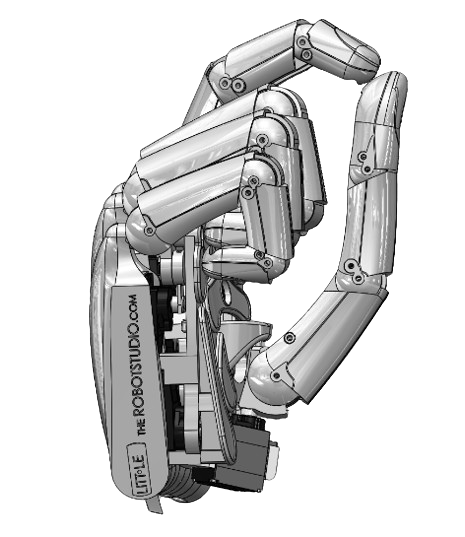

Fig 5: Nano Robot Hand (left) & DexHand (right)
These two hands are mentioned together due to their striking similarity and shared creator. However, DexHand stands out as the superior and more recent option, deserving the spotlight in this section. Nonetheless, Nano Robot warrants a mention for its unique feature: a built-in camera in its palm, a notable departure from the norm.
DexHand emerges as the most comprehensive and human-like hand among the options. With 16 tendon-actuated joints, it boasts exceptional functionality, including abduction/adduction and flexion/extension capabilities for each finger. The use of tendon technology not only enhances reactivity and speed but also opens avenues for intriguing research in robot control. Despite the complexity of working with tendons, the hand’s assembly process is well-documented, complemented by a comprehensive Youtube playlist.
One challenge with DexHand is its lack of compatibility with Universal Robots, as it is designed to be mounted on its own anthropomorphic arm. However, the hand’s numerous advantages may justify the development of an attachment device for integration with Universal Robots.
Click here to see DexHand movement.
Click here to see Nano Robot Hand movement.
Conclusion
We are confident that one of these four top candidates will prove useful for the challenges ahead. We have curated the best low-cost open-source anthropomorphic hands for each respective actuation type. Now, it is simply a matter of weighing the pros and cons. Nevertheless, we are assured that at least one can be constructed in our laboratory. Importantly, all of these options, despite their differences, can contribute to advancing the field of hand robot control.